Viewport3 were appointed lead contractors on a project to create a 3D model of a flooded quarry in the UK. A collaborative project which saw the team fusing different types of 3D data together, Viewport3 co-ordinated a variety of contractors including an offshore surveyor, a specialist technical drone company, an ROV provider and a survey vessel and crew.
The end-user of the data wanted to be able to measure between specific areas of the site. These measurements would be collected in preparation for the installation of hardware for a potential building project. For example some measurement began from a 3D point colllected using underwater sonar data, with the measurement passing through the water-line and ending at a 3D point which was collected using topside LiDAR, making the accurate ‘fusion’ of such data a critical operation.
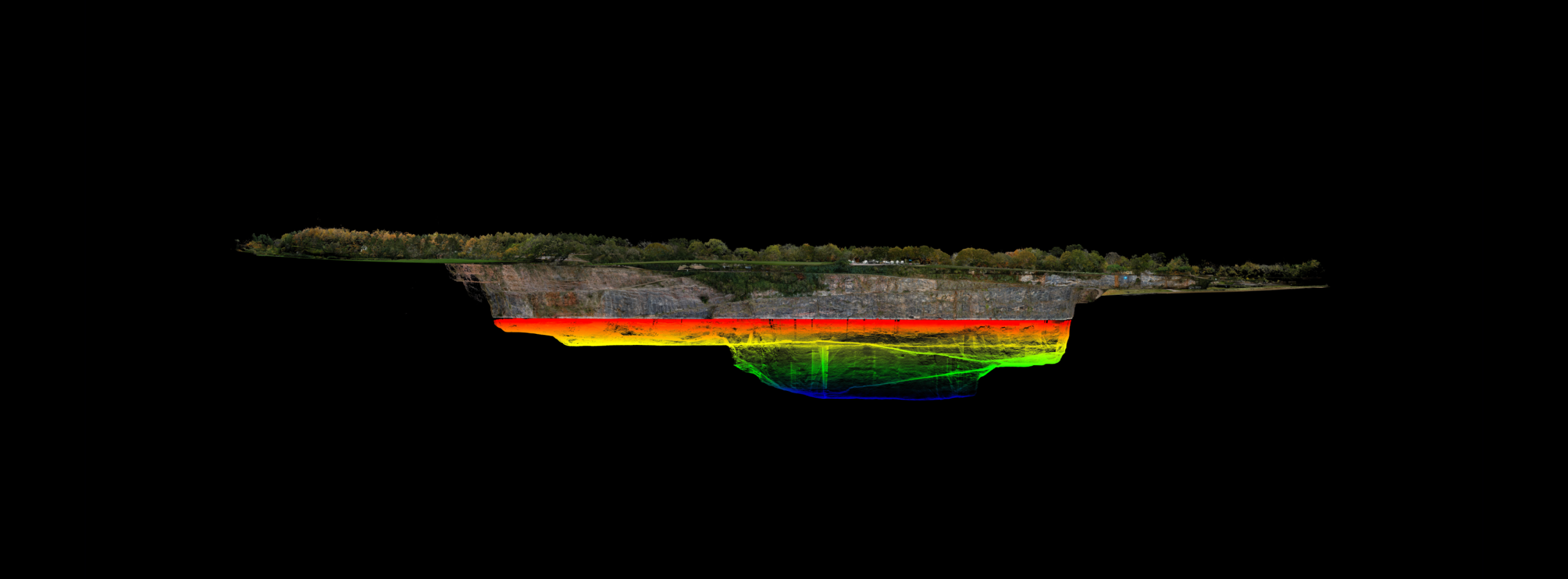
We were tasked with producing a model that recreated data from the deepest part of the quarry up to the water-line and beyond the cliff, and supplying that as a single multi-source (or ‘fused’) 3D data set. Different scanning methodologies were required to extract the data from different areas of the quarry. We carried out our trademark photogrammetry scanning, but what singled out this project was the requirement to merge the photogrammetry data with the acoustic mapping (MBES) and LiDAR. That’s where our specialist processing skills really came into their own.
The other challenge came from managing and co-ordinating the logistics of 11 people on site, deploying a variety of inspection methodologies on the different natural aspects of the quarry, as well as collecting sediment samples from the quarry bed. On a practical level, the challenge for Viewport3 was to co-ordinate each of these contractors, methodologies and data-sets to register all 3D shapes together into one single model.
In a bid to mitigate vessel costs, it was necessary to complete the project within a stringent time-frame. This wasn’t helped by the weather conditions (fog) or the fact that a military exercise was also taking place at the time! Moving mooring ropes out of the way in order to scan as accurately as possible, was an unforeseen hindrance.
Viewport3 Director, Chris Harvey was on-site throughout the project, and as team leader, co-ordinated all of the necessary personnel and equipment. Viewport3 hired a survey vessel from a company near the Severn, and equipped it with a multi-beam echo sounder (MBES), integrated GPS and LIDAR – a type of laser scanner – all of which would accurately scan the quarry walls above and below the water-line. The remainder of the data was collected by an aerial drone using an RTK positioning system and photogrammetry.
The data-gathering process took 4 days, and results were issued 10 days later.
The parties agreed on the best way to combine the various data sets. It was done using a GPS system from the drone, allowing us to geolocate the topside information. The underwater data was geolocated using GPS, but calibrated to the customer’s preferred Geodesic – the mathematical process of identifying a point on a sphere.
Viewport3 processed the data, which required an element of work to align the two positional systems so they talked the same language, and then to amalgamate the two point-clouds.
Points of data in the amalgamated 3D cloud: 909 million
Number of UAV flights: 7 flights
Number of days on site: 4 days
Area covered: 71 acres
